ปัจจุบันเริ่มมีการใช้โดรนอย่างมากมาย เช่น จัดส่งสินค้า ช่วยเหลือในเหตุรถเสีย ช่วยดับเพลิง และในช่วงวิกฤติ COVID-19 ได้มีการใช้โดรนช่วยในการจัดส่งอุปกรณ์ทางการแพทย์อีกด้วย เชื่อว่าในอนาคตจะมีฝูงบินของโดรนออกมาให้บริการขนส่งสินค้าอย่างมากมาย สิ่งที่น่าเป็นห่วงคือเมื่อการจราจรทางอากาศค่อนข้างจะคับคั่งและการบินไปในที่ซอกตึกแคบ ๆ อาจเสี่ยงที่โดรนจะชนกันได้ นักวิจัยของ Caltech จึงได้พัฒนาอัลกอริทึมแมชชีนเลิร์นนิงที่เรียกว่า Global-to-Local Safe Autonomy Synthesis (GLAS) ที่ช่วยให้ฝูงโดรนบินท่ามกลางสภาพแวดล้อมที่หนาแน่นและไม่เคยมีแผนที่ในระบบนำทาง โดยให้โดรนแต่ละลำสามารถปรับระดับการบินได้เหมาะกับสภาพแวดล้อมเพื่อไม่ให้ชนกันได้
ฝูงโดรนที่บินจำนวนมากจะพบกับความท้าทาย 2 เรื่อง คือ การบินไปในสภาพแวดล้อมใหม่ที่ไม่เคยสร้างแผนที่และเส้นทางในระบบนำทางได้ และโดรนที่บินจำนวนมากจะหลบหลีกอย่างไรไม่ให้ชนกัน ซึ่ง GLAS จะช่วยให้โดรนแต่ละลำประสานกับโดรนลำอื่น ๆ เพื่อกำหนดเส้นทางการบินของตัวเอง โดยใช้โมเดลการกระจายข้อมูลการบินไปสู่โดรนทุกลำที่ร่วมอยู่ในสภาพแวดล้อมเดียวกันขณะนั้น ซึ่งจะช่วยให้โดรนปรับตำแหน่งตัวเองและปรับขนาดฝูงบินให้เข้ากับสภาพแวดล้อมได้ จึงไม่ทำให้บินชนกัน
นอกจากนี้ยังมี Neural-Swarm คือตัวควบคุมการติดตามฝูงโดรนที่ช่วยเพิ่มการเรียนรู้แรงกระทำตอบโต้ทางอากาศพลศาสตร์ที่ซับซ้อนในการบินระยะใกล้ เช่น การลดระดับต่ำลงมาจากโดรนที่บินอยู่ด้านบน
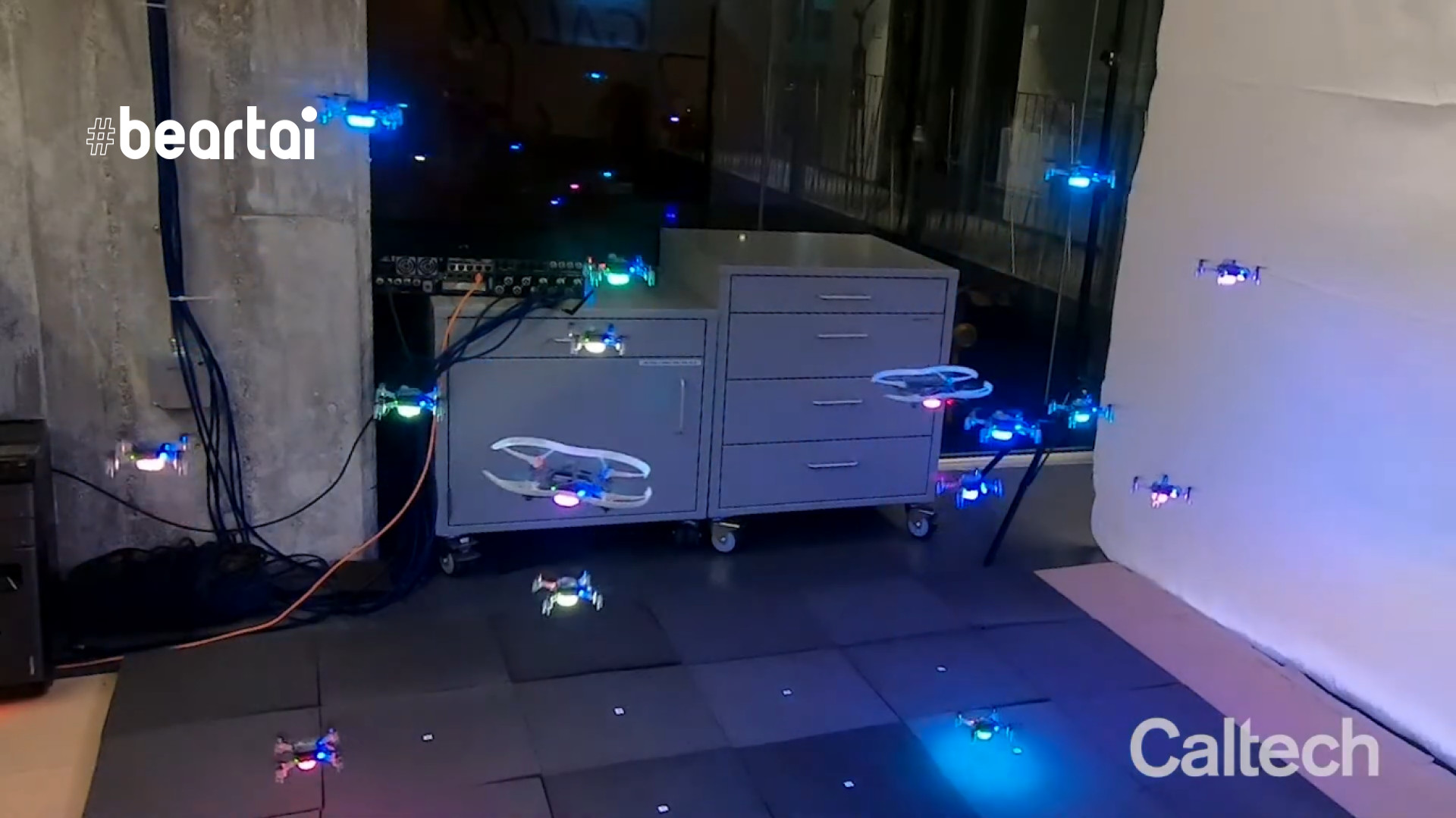
ทีมงานได้ทดสอบการใช้ GLAS และ Neural-Swarm ในฝูงโดรนแบบคอปเตอร์ 4 ใบพัดจำนวน 16 ลำ โดยให้บินอยู่ในสนามการบินโดรนแบบเปิดที่ศูนย์ของ Caltech ซึ่งพบว่า GLAS สามารถทำได้ดีกว่าอัลกอริทึมการวางแผนการเคลื่อนไหวแบบหลายสมองกลที่ทันสมัยซึ่งใช้งานกันในปัจจุบัน 20% ในหลายกรณีด้วยกัน ส่วน Neural-Swarm มีประสิทธิภาพที่เหนือกว่าตัวควบคุมแบบ Commercial ซึ่งไม่ได้คำนึงถึงแรงกระทำตอบโต้ทางอากาศพลศาสตร์และมีข้อผิดพลาดในการติดตามน้อยกว่ามาก
เชื่อว่าอัลกอริทึมแบบใหม่ของ Caltech ที่นำเสนอมานี้จะถูกนำไปปรับใช้สำหรับฝูงโดรนที่จะบินออกมาให้บริการในด้านต่าง ๆ อย่างมากมายในอนาคตอันใกล้นี้
พิสูจน์อักษร : สุชยา เกษจำรัส